详解自动驾驶的五大域控制器技术及其在通信与自动控制中的研究
随着汽车智能化浪潮的推进,自动驾驶技术正从概念逐步走向现实。在这一进程中,域控制器(Domain Controller) 扮演着“车载超级计算机”的关键角色,它通过整合、处理来自车辆各传感器的海量数据,并执行复杂的决策与控制算法,是实现高度自动驾驶(L3及以上)的核心硬件基础。传统分布式电子电气架构已无法满足高阶自动驾驶对算力、带宽和安全性的苛刻要求,集中化的域控制器架构应运而生。本文将深入详解构成自动驾驶系统的五大核心域控制器技术,并探讨其背后的通信与自动控制关键技术研究。
一、自动驾驶五大域控制器技术详解
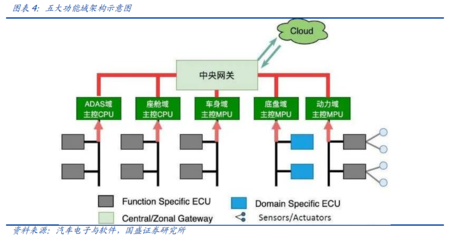
域控制器本质上是为特定功能域服务的、高性能的集中化计算单元。在自动驾驶领域,通常可以划分为以下五大核心域:
1. 自动驾驶域控制器(ADCU - Autonomous Driving Control Unit)
- 核心职能:这是自动驾驶的“大脑”,负责最高层的环境感知、融合定位、决策规划与控制执行。它集成高算力AI芯片(如英伟达Orin、华为MDC、地平线征程等),运行复杂的神经网络模型,处理摄像头、激光雷达、毫米波雷达等多源异构传感器数据,实时构建车辆周围环境的精准模型,并规划出安全、舒适、高效的行驶轨迹。
- 技术挑战:超高算力需求(TOPS级别)、低延迟、高可靠性与功能安全(ASIL-D级)。
2. 智能座舱域控制器(CDCU - Cockpit Domain Control Unit)
- 核心职能:负责驾乘人员的交互体验,整合仪表盘、中控屏、抬头显示(HUD)、流媒体后视镜、语音助手、人脸识别、娱乐系统等。随着自动驾驶级别的提升,座舱域需要与自动驾驶域紧密协同,例如在自动驾驶接管时提供清晰的人机交互接口。
- 技术挑战:多屏异构显示驱动、高性能图形处理、自然流畅的多模态交互、与自动驾驶域的安全信息共享。
3. 车身域控制器(BDCU - Body Domain Control Unit)
- 核心职能:传统上负责车身舒适与便利功能,如门窗、灯光、雨刮、空调、PEPS(无钥匙进入启动)等控制。在智能汽车中,其角色正从简单的控制向网关和能源管理拓展,并需为自动驾驶系统提供稳定的车身状态信息(如车门状态)。
- 技术挑战:高集成度以替代大量分散的ECU、可靠的网络网关功能、低功耗管理。
4. 动力域控制器(PDCU - Powertrain Domain Control Unit)
- 核心职能:在电动车中尤为关键,负责三电系统(电池、电机、电控)的协调管理与优化控制。对于自动驾驶而言,动力域需要精确、快速、平滑地执行自动驾驶域发出的加速、制动、转向等控制指令,是实现“线控底盘”的关键一环。
- 技术挑战:高实时性、高精度控制、与自动驾驶域的协同响应、功能安全。
5. 底盘域控制器(VDCU - Vehicle Dynamics Domain Control Unit)
- 核心职能:负责车辆横向、纵向及垂向的动态控制,集成传统的ESC(电子稳定控制系统)、EPS(电动助力转向)、ABS(防抱死系统)等功能,并向线控转向、线控制动演进。它是自动驾驶执行层的最终“手脚”,必须毫秒不差地执行规划轨迹。
- 技术挑战:极高的实时性与可靠性(ASIL-D级)、冗余设计、与动力域的协同控制。
二、通信与自动控制关键技术研究
五大域控制器并非孤立运作,它们通过高速、可靠、安全的车载网络紧密连接,形成一个协同工作的整体系统。这背后涉及两大核心研究方向:
1. 车载网络通信技术
- 高速骨干网:域间通信需要极高的带宽。以太网(特别是车载以太网,如1000BASE-T1/10BASE-T1S) 正成为域控制器互联的主流骨干网,替代传统的CAN/CAN FD,以满足传感器数据流、高清地图更新、软件OTA等大数据量传输需求。
- 实时性与确定性:自动驾驶控制指令的传输要求极低的延迟和抖动。时间敏感网络(TSN) 技术通过在以太网上提供时间同步、低延迟和流量调度,为自动驾驶的实时控制提供通信保障,是当前研究热点。
- 安全与可靠性:通信安全是功能安全的基石。研究包括车载防火墙、入侵检测系统、安全协议(如MACsec) 以及通信冗余设计(如双环网),确保网络在部分故障或遭受攻击时仍能维持关键功能。
2. 跨域协同与自动控制技术
- 系统架构与中间件:如何让五大域高效、解耦地协同工作是核心课题。面向服务的架构(SOA) 和先进的车载中间件(如ROS 2、AUTOSAR Adaptive)被广泛应用。它们提供标准的服务接口和通信机制,使得感知、决策、控制等软件功能能够灵活部署在不同域控制器上,并实现动态通信。
- 控制算法集成与优化:自动驾驶的最终表现依赖于各域控制算法的无缝集成。研究重点包括:
- 纵向与横向协同控制:将动力域(驱动/制动)与底盘域(转向)的控制深度耦合,实现平滑精准的轨迹跟踪。
- 预测控制与容错控制:基于车辆动力学模型和交通环境预测,设计模型预测控制器(MPC),并在传感器或执行器部分失效时启动容错控制策略,确保安全降级。
- 车-云-路协同控制:域控制器不仅处理车端信息,还需通过5G/V2X通信与云端(高精地图、交通调度)及路侧设备(信号灯、路况)交互,实现更优的全局决策与控制,这是迈向高阶自动驾驶的关键。
结论
自动驾驶五大域控制器技术构成了车辆智能化的硬件与功能核心,而高速可靠的通信网络与先进的跨域协同控制算法则是串联起这些“智能器官”的“神经网络”与“中枢指令”。未来的发展趋势将是进一步集中化,从“域融合”走向“中央计算平台+区域控制器”的架构,以进一步降低成本、提升算力利用效率和系统集成度。通信技术的演进(如TSN的成熟应用)与控制理论的创新(如基于深度学习的控制、群体智能控制),将持续推动自动驾驶系统向更安全、更高效、更舒适的方向迈进。对这一技术矩阵的深入研发与整合,是赢得自动驾驶未来竞争的关键所在。
如若转载,请注明出处:http://www.huajian-china.com/product/75.html
更新时间:2026-04-19 04:14:51